Forward and Inverse Kinematics
In Classical Mechanics, Dynamics invloves motions of bodies with respect to Forces, while Kinematics involves motions of bodies without consideration of Forces. Forward and Inverse Kinematics involves the motion of limbs (links) by rotation of joints (connectors). In fact, it is the transformatin of Joint Space to Task Space. What is really interesting about Forward and Inverse Kinematics is it is where Art (Animation) and Engineering (Robotics) intersects.
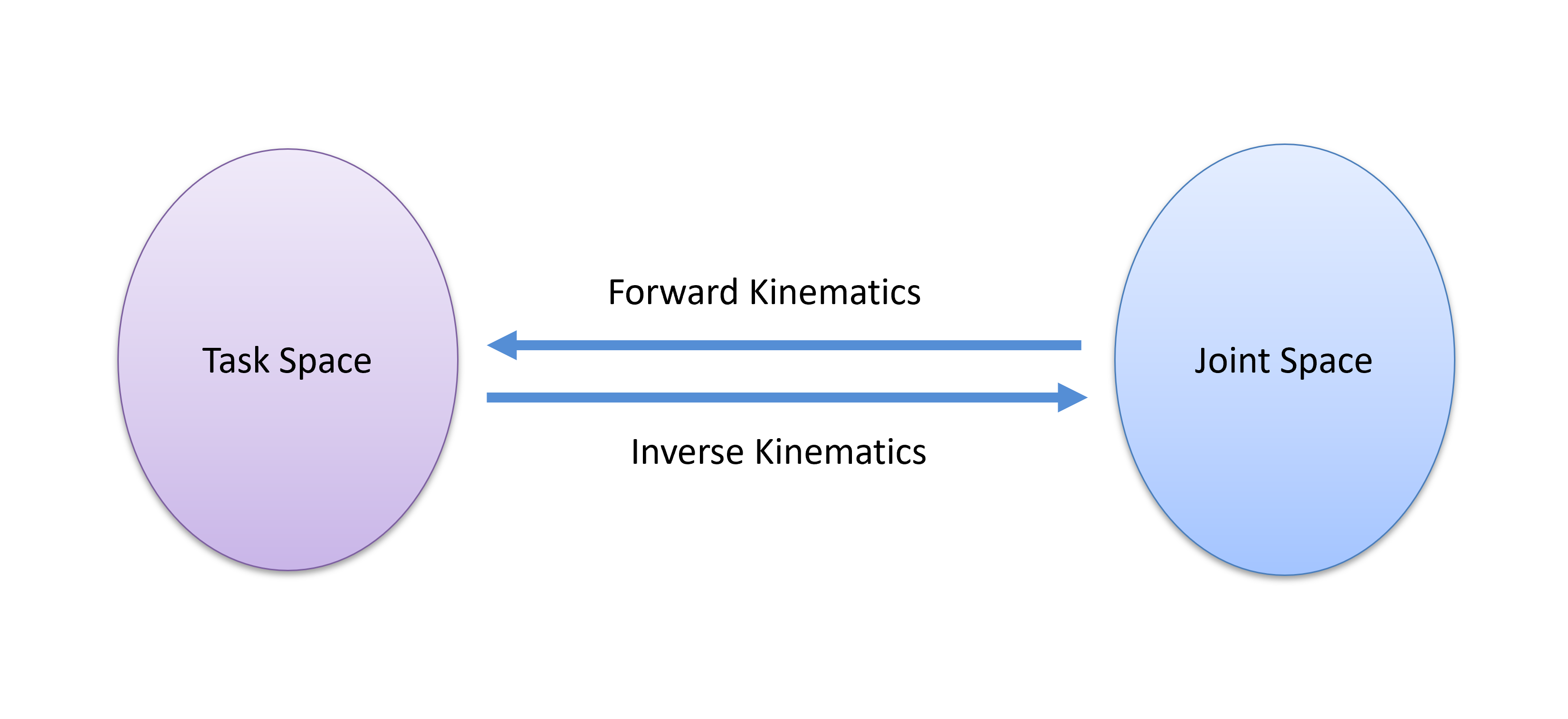
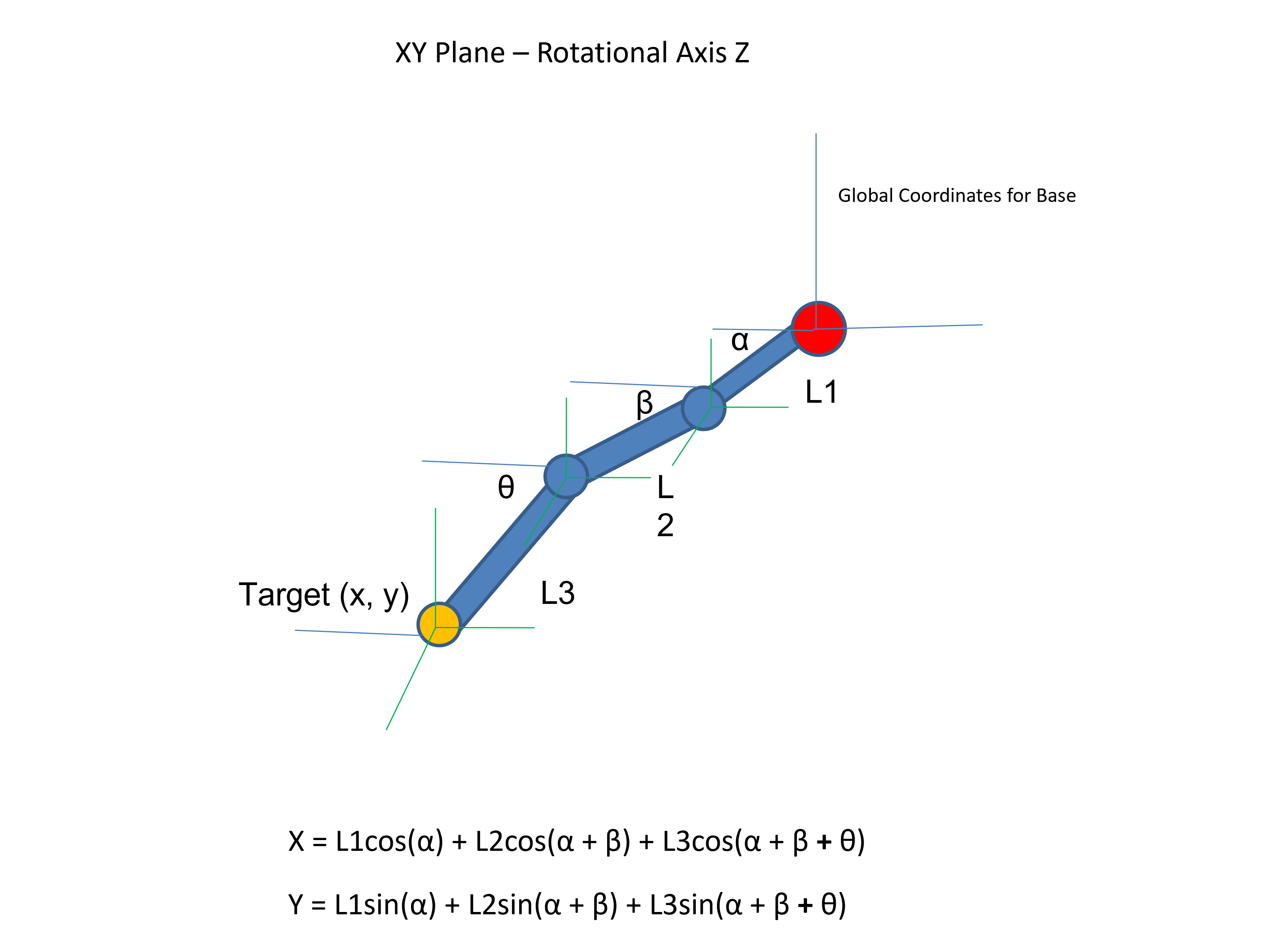
Forward Kinematics
Forward Kinematics only considers the transformation from Joint Space to Task Space. However, there could be a series of N Limbs (Links) connected by M Joints (Connectors). Therefore, the final position of the end effector is dependent on the individual of rotatons of different joints. Then, the calculation of final position invovles:
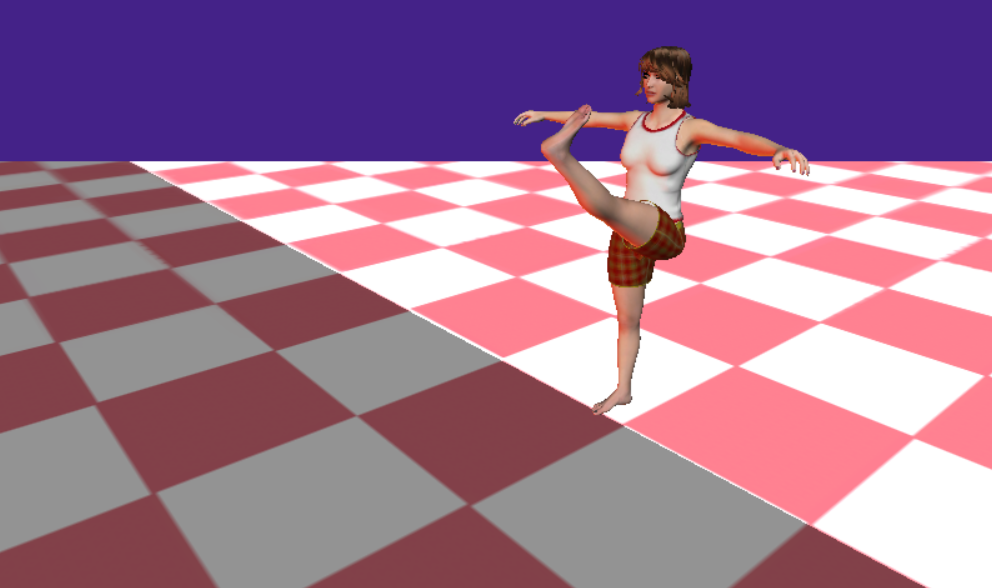
Skeletal Animation
Skeletal Animation is actually to animate an 3D Model by rotating its joints. However, just rotation of joints is not enough as the vertices of 3D Model can be deformed, and therefore, there are some solutions with skinning the meshes of 3D Model to its joints. For more information, please visit OpenGL.

Chinlone Pose: မဟာဒူး